










QR-kod

Om oss
Produkter
Kontakta oss

Telefon

E-post

Adress
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

När tillverkningsindustrin accelererar mot större precision och effektivitet har högre krav ställts på nivån på automatisering och intelligens i produktionsprocessen. Inför komplexa och mycket exakta arbetsstycken som tröghetsringar har traditionella belastningsmetoder blivit otillräckliga. Just nu har ökningen av 3D -visionstekniken gett revolutionära lösningar på detta problem. Det förbättrar inte bara noggrannheten i utfodring, utan förbättrar också produktionslinjens flexibilitet och effektivitet.
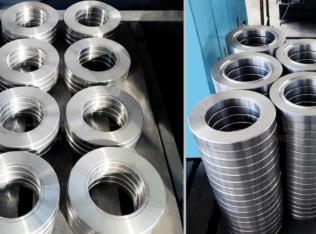
Den grundläggande principen för 3D-visionsteknologi är att bearbeta och analysera den tredimensionella rumsliga informationen om objekt genom datorer och uppnå operationer som objektigenkänning, upptäckt, spårning och mätning. Vid tillämpningen av exakt utfodring av tröghetsringar fångar 3D-syntekniken den tredimensionella rumsliga informationen från tröghetsringen, vilket ger roboten exakt greppposition och hållning, vilket uppnår exakt utfodring av tröghetsringen.

När det gäller avbildningsalgoritmer antar 3D -synteknologi avancerade algoritmer för att hantera komplexa situationer som ytreflektion och oljefilmtäckning av tröghetsringar. Genom att optimera algoritmer kan systemet generera tydliga och exakta punktmolndata, vilket ger en solid grund för efterföljande erkännande och fångst.
När det gäller val av kamera måste 3D -synsystem välja kameror med hög upplösning, stort synfält och stort fältdjup. Denna typ av kamera kan fånga den tröghetsringens fullständiga form och storlek, vilket säkerställer att roboten exakt kan hitta målpositionen under greppprocessen. Samtidigt gör det i fältets karakteristik att upprätthålla kameran att upprätthålla tydliga avbildningseffekter på olika avstånd, vilket ytterligare förbättrar utfodringens noggrannhet.

Förutom avbildningsalgoritmer och val av kameror måste 3D -synteknologi också vara nära integrerad med robotsstyrningssystem. Genom att överföra realtids tredimensionell rumslig information om tröghetsringen till robotkontrollsystemet kan roboten exakt lokalisera positionen för tröghetsringen och utföra grepp. Detta informationsutbyte i realtid gör det möjligt för robotar att snabbt justera sina greppstrategier när de möter tröghetsringar med olika specifikationer, vilket uppnår flexibel produktion.
3D Vision Technology har spelat en viktig roll i den exakta utfodringsprocessen för tröghetsringar. Genom att optimera avbildningsalgoritmer, välja lämpliga kameror och samtidigt samarbeta med robotstyrningssystem, uppnår denna teknik effektiv och exakt grepp om tröghetsringar, förbättrar produktionseffektiviteten och minskar produktionskostnaderna.
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
