











QR-kod

Om oss
Produkter
Kontakta oss

Telefon

E-post

Adress
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

Projektöversikt
Detta projekt syftar till att utforma ett effektivt och stabilt dumpningsbilt för lastbil för att tillgodose avgiftsbehovet hos kunder under inomhusproduktionsförhållanden i Shanxi -regionen. Systemet måste uppnå obemannad drift och kontroll av tekniska fordon, endast genomföra hanterings- och automatiska laddningsfunktioner för punkter A och B för att uppfylla de kontinuerliga driftskraven i produktionslinjen.
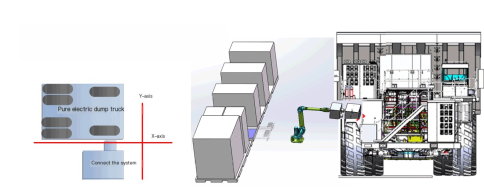
systemkomposition
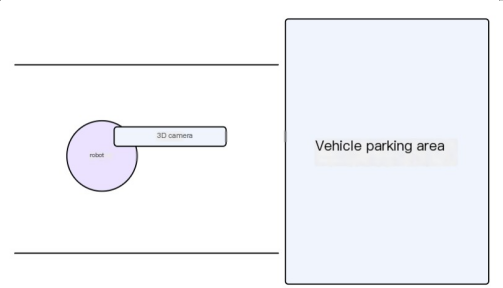
Visuellt positioneringssystem: Använd högprecisionskameror och visuella algoritmer för att uppnå exakt positionering av laddningsporten på dumpbilar. Det visuella systemet måste ha förmågan att motstå damm och direkt solljus, vilket säkerställer stabil drift i olika inomhusmiljöer.
Roboter och pistolskjutande mekanismer: Industriella robotar med armspänn på 3M eller mer väljs, utrustade med specialdesignade pistolskyddsmekanismer. Pistolens tryckmekanism bör ha tillräckligt med drivkraft och noggrannhet för att säkerställa att laddningspistolen kan sättas exakt och snabbt sätts in i laddningsporten.
Laddningssystem: Utrustat med högeffektutrustning med 3 megawatt, vilket säkerställer att dumparen kan laddas fullt ut på kort tid och förbättra produktionseffektiviteten.
Kontrollsystem: Genom ett integrerat styrsystem kan exakt kontroll av visuell positionering, robotrörelse och laddningsprocess uppnås. Kontrollsystemet bör ha höga automatiserings- och intelligensegenskaper och kunna uppnå obemannad automatisk laddning.
Arbetsflöde
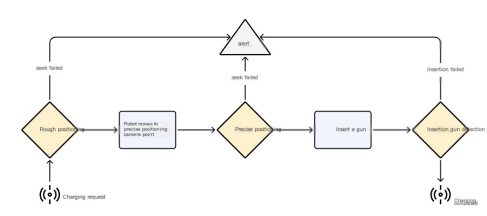
Självdumpning av lastbilspositionering: Identifiera och lokalisera laddningsportens position för dumpning av lastbilen genom ett visuellt positioneringssystem.
Robotrörelse: Kontrollsystemet leder roboten att flytta nära laddningsporten för dumpning av lastbilen baserat på visuella positioneringsresultat.
Tryckning av pistolinsättning: Roboten är utrustad med en tryckande pistolmekanism, som snabbt och snabbt sätter in laddningspistolen i laddningsporten i dumpning.
Laddningsprocess: Laddningssystemet börjar ladda dumparen tills den når den förinställda effektnivån eller tiden.
Robot evakuering: När laddningen är klar kommer roboten att evakuera laddningsporten och vänta på ankomsten av nästa dumpning.
tangentteknik
Visuell positioneringsteknik: Genom att använda algoritmer som djup inlärning kan noggrannheten och stabiliteten i visuella positioneringssystem förbättras.
Robottkontrollteknologi: Optimera robotrörelsesbanan och hastighet för att förbättra laddningseffektiviteten.
Design av pistolens skjutmekanism: Se till att pistolskjutningsmekanismen har tillräcklig drivkraft och noggrannhet, samtidigt som man överväger dess strukturella kompakthet och tillförlitlighet.
Riskrespons
Inomhusmiljöskydd: Se till en ren och torr inomhusmiljö, minska påverkan av damm och direkt solljus på det visuella positioneringssystemet.
Hårdvaruunderhåll: Regelbundet underhålla och underhålla hårdvara som robotar och visuella positioneringssystem för att säkerställa deras normala drift.
Professionell utvärdering: Bjud in proffs att utvärdera och optimera pistolskyddsmekanismen, laddningssystemet etc. för att säkerställa lösningens säkerhet och genomförbarhet.
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
