











QR-kod

Om oss
Produkter
Kontakta oss

Telefon

E-post

Adress
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

Med den snabba utvecklingen av intelligent tillverkningsteknik blir tillämpningen av automatiserade produktionslinjer inom området magnetstålproduktion alltmer utbredd. Traditionell manuell belastnings- och lossningsmetoder har emellertid många problem, såsom låg effektivitet, instabil kvalitet, säkerhetsrisker etc. som inte längre kan tillgodose behoven i modern produktion. Fuwei Intelligence har föreslagit en sammansatt robotlösning för lastning och lossning av magnetiskt stål, som syftar till att förbättra produktionseffektiviteten, minska arbetskraftskostnaderna och säkerställa driftsäkerhet med intelligenta medel.

Branschsmärtpunkter
Låg produktionseffektivitet: Att förlita sig på manuell drift är det svårt att förbättra effektiviteten.
Instabil kvalitet: Noggrannheten och konsistensen i manuella operationer är svåra att garantera.
Stora säkerhetsrisker: Olyckor som handninning och påverkan är benägna att uppstå under drift.
Dålig arbetsmiljö: utgör ett potentiellt hot mot operatörernas hälsa.
Översikt över kundbehov och lösningar
Kundbehov: Vi hoppas kunna uppnå automatisk belastning och lossning av magnetiskt stål på intelligenta medel för att förbättra produktionseffektiviteten och kvalitetsstabiliteten. De specifika kraven inkluderar att slutföra lastning och lossning av två typer av produkter, med en cykeltid på cirka 80 sekunder för att slutföra lastning och lossning av två travar med produkter och har höga precisionskrav.
Lösningsöversikt:
Byte av motorer och servokontroller: Förbättra robotprestanda och stabilitet.
Utrustad med radarnavigering, lätta remsor och högtalare: Förbättra robotens autonoma navigering, synlighet och interaktivitet.
Design Anpassad gripare: Integrera kamera och sensor för att uppnå exakt erkännande och grepp om magnetiskt stål.
Optimera layout- och utrustningskonfigurationen för last- och lossningsområden för att säkerställa att robotar exakt och effektivt kan slutföra sitt arbete.
Implementering och optimering av planen

Kompositrobottransformation:
Välj högpresterande motorer och servokontroller för att säkerställa rörelsens noggrannhet och stabilitet.
Utrustad med radarnavigering för att uppnå autonom positionering och vägplanering.
Installera LED -lätta remsor och larmhögtalare för att förbättra synligheten och interaktiviteten.
Design anpassade gripare som integrerar kameror och sensorer för att uppnå exakt identifiering och gripande av magnetiskt stål.
Optimering av lastningsområdet:
Designpositioneringsguide slots för att vägleda magnetiskt stål till utsedda positioner.
Ställ in skrivbordspositioneringsmarkörer för att underlätta robotigenkänning och positionering av grepppunkter.
Renovering av materialavlastningsområde:
Ställ in enhetspositioneringsmärket för att säkerställa att roboten exakt placerar magneten.
Installera elektriska kontrollpaneldörrar och elektriska kontrollskjutspår för att skydda operatörerna från skador och uppnå automatiserad utrustning för utrustning.
Exekveringslogik och processoptimering
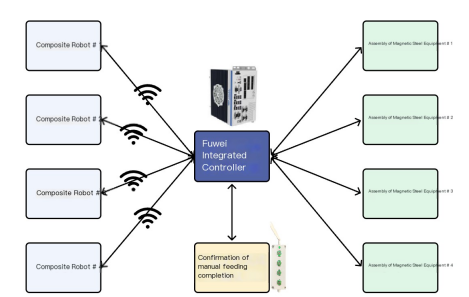
Exekveringslogiken för hela planen är baserad på processutformningen för den automatiserade produktionslinjen, vilket säkerställer arbetsflödets kontinuitet och effektivitet. Hela processen utlöses av en lastbegäran, och roboten utför materialhämtningsoperationer baserat på lastningsområdets status. Under processen att plocka och placera material uppnås exakt erkännande och kraftkontroll genom kameror och sensorer integrerade i griparen. När magneten har placerats på utrustningen bekräftar roboten slutförandet av lastning och fortsätter till nästa cykel.
Genom att använda Fuwei Intelligent Composite Robot för magnetisk stålbelastning och lossning kan den effektivt lösa problemen med traditionell manuell belastning och
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
