










QR-kod

Om oss
Produkter
Kontakta oss

Telefon

E-post

Adress
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

I den moderna tillverkningsindustrin som bedriver effektivitet, precision och automatisering blir tillämpningen av CNC -bearbetningsteknologi alltmer utbredd. Laddnings- och lossningsprocessen för CNC -maskinverktyg blir emellertid ofta en flaskhals som begränsar produktionseffektiviteten. För att övervinna denna begränsning har Fuweii Intelligent lanserat en sammansatt robot CNC -automatisk belastning och lossningslösning, omforma produktionsprocessen och förbättra produktionseffektiviteten och flexibiliteten.
Projektöversikt
Detta projekt syftar till att uppnå automatisk belastning och lossning av råvaror under CNC -bearbetning, samt nödvändiga inspektions- och rengöringsprocesser. Genom att introducera ett sammansatt AGV (automatiserat guidat fordon) kan robotarmsystem, i kombination med skanningskameror och positionering av synkameror, kan uppnås exakt och effektiv materialhantering och processhantering.
Systemkomposition
Composite AGV Robotic Arm System: Inkluderar nyckelkomponenter som AGV -kropp, robotarm, skanningskamera, positionering av synkamera, etc.
Kontrollsystem: Ansvarig för att ta emot uppgiftssignaler från ② ytautrustningssystemet, kontrollera AGV -robotarmsystemet för att slutföra åtgärder som material som grepp, hantering och placering.
Skanningssystem: Genom att skanna QR -koden på materialfacket med en skannkamera kan materialinformation matas in och spåras.
Positioneringssystem: Använd positionering av visionskameror för att uppnå exakt positionering och navigering av AGV -robotarmsystem.
Arbetsflöde
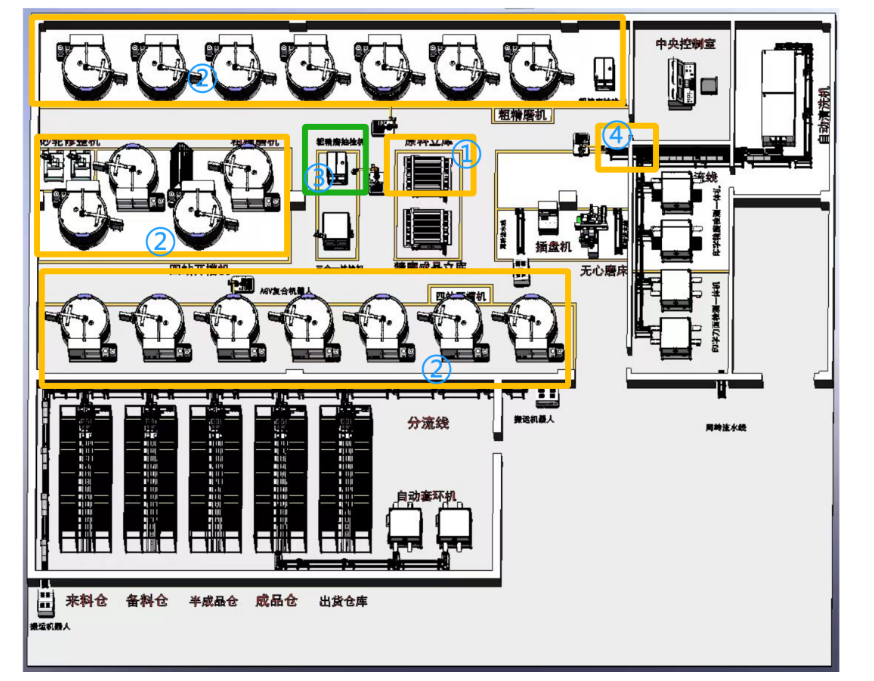
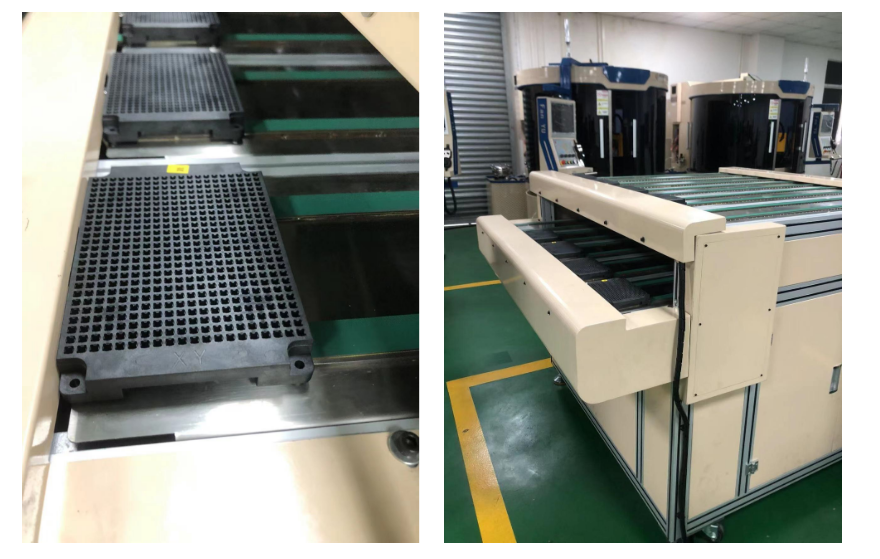
Råmaterialgrepp: Det sammansatta AGV -robotarmsystemet går till det första lagret av råmateriallagring för att ta tag i materialen som ska bearbetas enligt kontrollsystemets instruktioner.
Bearbetningsprocedur: Leverera de fångade materialen till maskinen i området ②, placera dem enligt maskinens interna placeringsposition och vänta på bearbetning.
Testningsprocess (valfritt): Om systemet utfärdar en testbegäran, skicka formskivan från maskinens testposition i området ② till placeringsområdet för testutrustning i område ③ för testning. När inspektionen är klar skickar du mögelskivan tillbaka till maskinen i området ②.
Rengöringsprocess: Placera de material som bearbetas av utrustningen i området ② på transportmaskinens transportlinje i området ④, och materialrengöringsarbetet slutförs automatiskt av transportlinjen.
Teknisk implementering
Composite AGV Robotic Arm System: Anta avancerad AGV -teknik och robotarmsteknologi för att uppnå effektiv och exakt materialhantering.
Skanningssystem: Använd högpresterande skanningskameror för att säkerställa korrekt inmatning och spårning av materialinformation.
Positioneringssystem: Använda avancerad visuell positioneringsteknik för att uppnå exakt positionering och navigering av AGV -robotarmsystem.
Kontrollsystem: Anta ett pålitligt kontrollsystem för att säkerställa stabila drift och effektivt samarbete för hela systemet.
Systemfördelar
Hög grad av automatisering: Förverkligande automatisk belastning och lossning, upptäckt och rengöring av råvaror i CNC -bearbetningsprocess, vilket förbättrar produktionseffektiviteten.
Hög precision: Genom att använda skanningskameror och positionering av visuella kameror kan exakt inmatning och exakt positionering av materialinformation uppnås.
Stark flexibilitet: Arbetsflödet kan justeras flexibelt efter faktiska behov för att uppfylla olika produktionskrav.
Stark spårbarhet: Genom att använda ett skanningssystem för att spåra och spåra materialinformation under hela processen kan nivån på produktkvalitetshantering förbättras.
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
