










QR-kod

Om oss
Produkter
Kontakta oss

Telefon

E-post

Adress
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

1 、 Projektöversikt
Denna plan syftar till att anpassa ett plattformssystem för Robot Education Practice för att möta undervisningsbehovet för ett universitetslaboratorium i maskinvision och kraftkontroll. Systemet kommer att utvecklas runt AUBO-I5 Collaborative Robot, HikVision Industrial Camera, 3D Camera och Six Axis Force Sensor för att uppnå funktioner som robotkontroll, visuell inspektion och kraftkontrollmontering och tillhandahålla öppen källkodsprogramvara för senare funktionell expansion.

2 、 Systemets hårdvarukomposition
Robot: Antagande av AUBO-I5 Collaborative Robot, den har egenskaperna för hög precision och hög säkerhet och är lämplig för undervisningsscenarier.
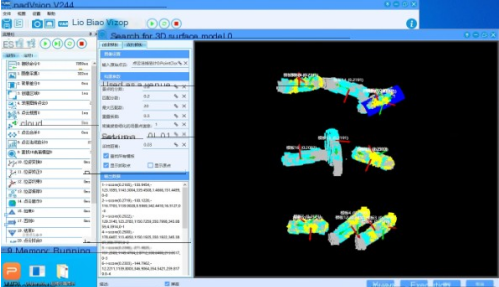
Kamera: Inklusive HikVision Industrial Camera och 3D Camera, som används för att få bildinformation om arbetsstycken, stödja traditionell bildbehandling och djup inlärningsbilddetektering.
Sixdimensionell kraftsensor: Kunwei (KWR75) eller andra märken väljs för realtidsövervakning av kraftinteraktionsinformation mellan robotens sluteffektor och arbetsstycket.
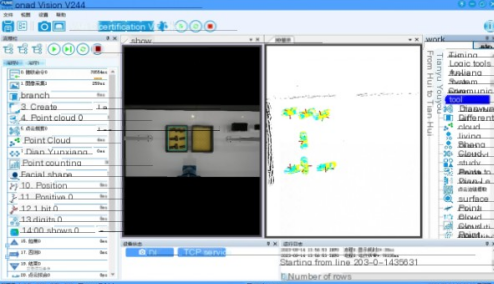
3 、 Design för övre datorprogramvara
Grundläggande funktioner:
Robotkontroll: Implementera funktioner som anslutning, frånkoppling, gemensam eller hållningskontroll av robotar.
Kamerakontroll: Implementera funktioner som kameraanslutning, frånkoppling och bildförvärv.
Statusdisplay: Real Time Display of the Robot's Joint and Pose Status, statusparametrar för Six Axis Force Sensor och bilder som fångats av kameran.
Exklusiva funktioner:
Axelhålmontering: Genom driften av den övre datorn, i kombination med visuell inspektion och kraftkontrollteknologi, uppnås axelhålets automatiska monteringsfunktion.
Gränssnittsdesign: Det övre datorgränssnittet ska vara kortfattat, tydligt och lätt att använda. Gränssnittet bör innehålla grundläggande funktionsknappar och ett statusdisplayområde, samt ge åtkomst till axelhålmonteringsfunktionen.
4 、 Funktionsimplementering
Maskinvision:
Traditionell bilddetektering: Använd mallmatchning, cirkelmontering, kantmontering och andra metoder för att lokalisera och känna igen arbetsstycken, stödja erkännandet av streckkoder, QR -koder, karaktärsnummer samt beräkningen av gråskalområde och plattmängd.
Djup inlärningsbilddetektering: Automatisk erkännande och lokalisering av arbetsstycken genom djupa inlärningsalgoritmer. Även om djup inlärning fortfarande kräver manuell kommentar av bilder, kommer vi att sträva efter att förbättra utbildningseffektiviteten och erkännande noggrannhet, vilket gradvis minskar annoteringsarbetsbelastningen.
Kraftkontrollmontering:
Att kombinera data från sexdimensionella kraftsensorer, uppnå kraftinteraktionskontroll mellan robotens sluteffektor och arbetsstycket och fullständig exakt montering av axelhålet.
5 、 Projektrisker och svarsåtgärder
Risk för samarbete med sex axelkraftsensorer: På grund av bristen på samarbete med sex Axis Force -sensorer kan det finnas vissa tekniska svårigheter och osäkerheter. Vi kommer att ordna ett professionellt tekniskt team för att ta itu med problemet och säkerställa en smidig integration och stabil drift av sensorerna.
Risk för djup inlärningsbilddetektering: Djup inlärningsbilddetektering kräver en viss nivå av igenkänningsnoggrannhet och effektivitet, samtidigt som man uppfyller kravet på ett klickutbildning. Vi kommer att fortsätta att optimera djupa inlärningsalgoritmer för att förbättra igenkänningsnoggrannheten och effektiviteten, samtidigt som vi utforskar sätt att implementera ett klickutbildning.
6 、 Postutvidgning och scenbyte
Den övre datorprogramvaran antar öppen källkodsdesign, vilket underlättar funktionell expansion och scenbyte efter behov vid senare undervisning. Till exempel kan monteringsscenen med axelhål bytas till uppgifter som meshing av fina växlar eller erkännande och grepp om andra arbetsstycken. Genom att modifiera och felsöka open source-program är det lätt att uppnå robotdrift och visuella detekteringsfunktioner i olika scenarier.
Denna plan integrerar hårdvaruresurser som robotar, kameror och sex Axis Force-sensorer, i kombination med Open Source-mjukvarutesign för övre dator, för att ge en funktion rik och lätt utbyggbar undervisningsmiljö för Robot Education Practice Platform. Genom användning av praktiska plattformar kan eleverna få en djupare förståelse för principerna och tillämpningarna av maskinsyn och kraftkontrollteknologi och förbättra deras praktiska och innovativa förmågor.
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
