











QR-kod

Om oss
Produkter
Kontakta oss

Telefon

E-post

Adress
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

Projektbakgrund
Med den kontinuerliga utvecklingen av den globala handeln har containertransport blivit ett av huvudlägena för internationell logistik. För att förbättra effektiviteten i behållarbelastning och lossning, minska arbetskraftskostnaderna och säkerställa säkerheten för varor har Fuwei Intelligent utformat och implementerat en uppsättning av sammansatta robottonbehållarprojekt enligt kundkraven, som syftar till att verifiera genomförbarhet, stabilitet och effektivitet i containeroperationer och hjälpa kunderna att uppnå kostnadsminskande och effektivitetsförbättring.
Projektmål
Huvudsyftet med detta projekt är att utvärdera prestanda för kompositrobotar vid behållarbelastning och lossning, hantering, palletisering och andra aspekter och utvärdera deras prestanda i faktiska arbetsmiljöer.

Introduktion till sammansatt robotsystem
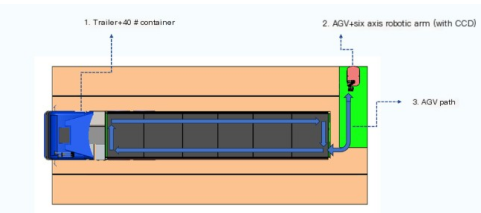
Det sammansatta robotsystemet som används i detta projekt kombinerar en robotarm, AGV (automatiserat guidat fordon) och intelligent styrsystem, med funktioner som autonom navigering, exakt positionering och flexibel drift. Robotarmen är ansvarig för att ta tag i och placera varor i behållaren, AGV är ansvarig för rörelsen och placeringen av roboten, och det intelligenta kontrollsystemet ansvarar för övergripande uppgiftsplanering och samordning.
Testinnehåll och metoder
Robot Arm Operation Test: Testa greppnoggrannheten, hastigheten och stabiliteten på robotarmen i en simulerad containermiljö. Observera anpassningsförmågan och driftseffektiviteten för robotarmen genom att ställa in olika storlekar, former och vikter av varor.
AGV Mobile och positioneringstest: Testa AGV: s autonoma navigering, hinderundvikande, positioneringsnoggrannhet och andra funktioner i en containergårdsmiljö. Genom att ställa in olika vägar och hinder, verifiera AGV: s stabilitet och tillförlitlighet i faktiska arbetsmiljöer.
Integrerad systemlänkningstest: Länk robotarmen med AGV för att simulera den faktiska behållarbelastningen, lossning, hantering och palletiseringsprocesser. Utvärdera det övergripande systemets samarbetsförmåga och effektivitet genom att ställa in olika arbetsscenarier och rytmkrav.
Efter flera testrundor presterade den sammansatta roboten bra i
Nr 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
